PointModeller – las herramientas adeucadas para el trabajo
Maptek PointModeller ofrece una potente visualización en 3D, registro y filtrado inteligente, para obtener valor de los datos de sensores móviles o aéreos para proyectos de canteras, civiles o topográficos.
Las operaciones que se basan en datos de nubes de puntos capturados por drones u otros sensores móviles livianos están bien atendidas por la última solución de procesamiento de nubes de puntos de Maptek.
Maptek PointModeller es ideal para convertir rápidamente dichos datos en entregables para aplicaciones de minería, ingeniería civil, topografía, movimiento de tierras, canteras y agregados.
Las nubes de puntos se traducen en superficies, volúmenes y otros resultados precisos en minutos.
Maptek se dio cuenta de que los usuarios de drones o sensores móviles a menudo recopilaban grandes volúmenes de datos, pero carecían de las herramientas para convertirlos rápidamente en información para respaldar las decisiones que afectan los proyectos.
Las herramientas inteligentes optimizan los flujos de trabajo para crear fácilmente superficies topográficas o 3D, calcular volúmenes sólidos y de superficies, gestionar el inventario de existencias, crear líneas inteligentes para la punta y la cresta, y realizar un seguimiento de la conformidad de la excavación con el diseño
Los datos ahora pueden combinarse desde una variedad de sensores digitales y exportarse a CAD y formatos de diseño de minas.
PointModeller se ofrece como un paquete de suscripción rentable que admite todos los archivos .las, .laz, .e57, .obj o de texto y exporta los entregables en formatos estándar.
- La nueva solución de nube de puntos para los mercados civil, de canteras y de áridos incluye herramientas de registro inteligentes para el manejo de datos subterráneos y de superficie.
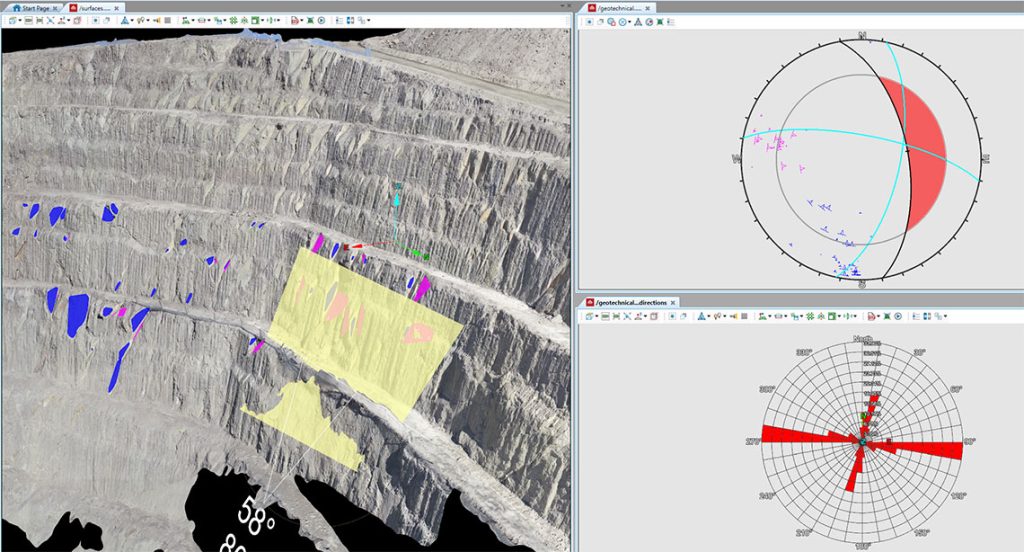
- Los usuarios pueden construir su kit de herramientas con complementos para análisis geotécnico, conformidad de diseño e informes.
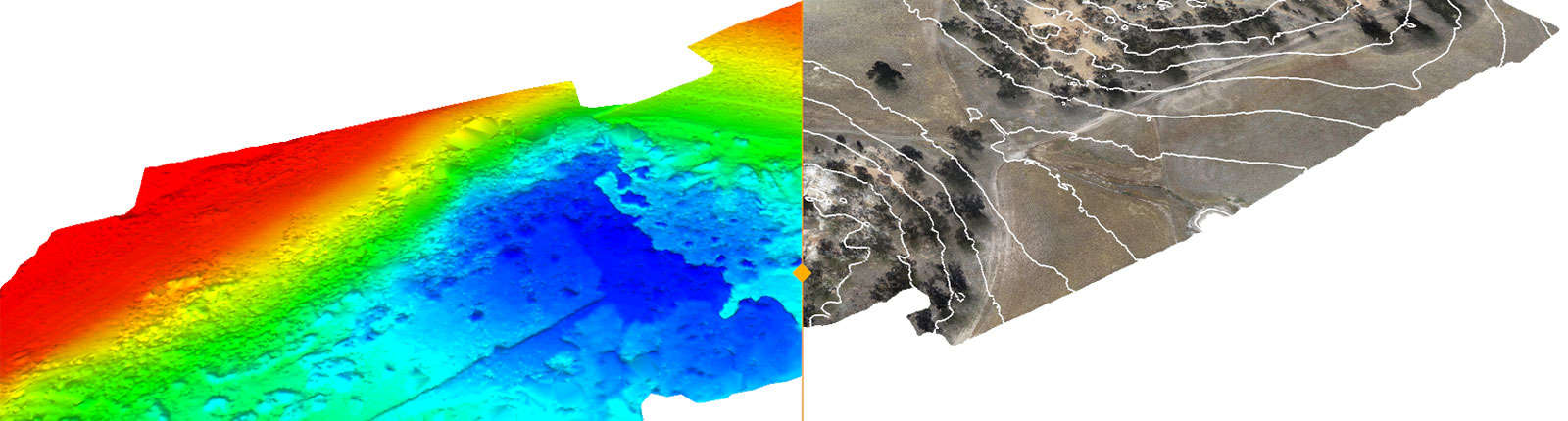
- La función de fotogrametría convierte imágenes de drones directamente en una nube de puntos, una superficie texturizada o imágenes ortomosaicas.